Colonising Polynesia; Uncertain sailing craft route modelling
- Started
- 26th September 2016
- Research Team
- David Sear
- Investigators
- Thomas Dickson
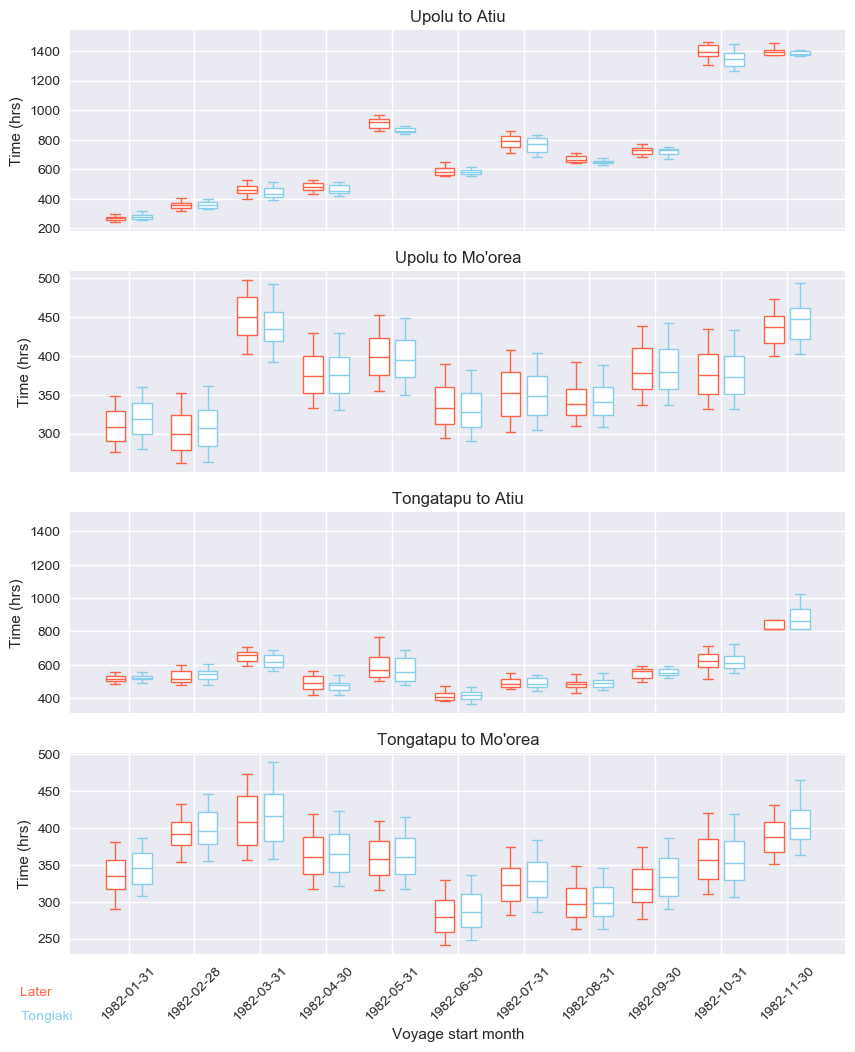
Sailing craft route modelling to compare two designs over four routes for a year of weather conditions. This demonstrates, for the first time, that the Colonisation of Polynesia was purely determined by the weather.
Polynesia was colonised over a period of hundreds of years using ancient seafaring technology to complete voyages which were hundreds of kilometers long. It is not known why there was a long pause in time between East Polynesia and the first settlers arriving on islands such as New Zealand, Easter Island and Hawaii. Considerable research has been completed into the specific performance of Polynesian seafaring technology and the weather experienced at the time. No research has successfully performed sailing craft route modelling in order to understand whether it was the sailing craft performance, environmental conditions or human factors which contributed significantly to the long pause. This research will investigate the Polynesian voyaging problem through modelling uncertainty within the sailing craft route simulation process.
This project is taking a trans-disciplinary approach to investigate an archaeological issue using modern engineering methods. This has involved identifying key technical requirements for the analysis through understanding a qualitative human problem. The core of the analysis is solving a shortest path problem within the sailing craft domain. This is a computationally expensive process due to the level of accuracy required. Iridis has allowed a level of accuracy not seen elsewhere in the field of marine routing. Uncertainty arises in the robustness of the solution algorithm, the range of weather conditions experienced and the performance of the sailing craft. Each area requires multiple simulations to quantify, something that would not be possible without access to Iridis.
Code has been written using the Julia language. This language was designed to allow parallization. It was possible to extend from a single serial simulation to parallizing the code in order to run the number of simulations required to model the significant uncertainty in the maritime domain. The route modelling methodology has been extended to model the reliability of a sailing craft within the route optimisation process. This has allowed novel research to be undertaken in the field of autonomous robotic sailing.
Categories
Algorithms and computational methods: statistical analysis
Software Engineering Tools: Continuous Integration, Git, Jenkins
Programming languages and libraries: Julia, Pandas, Python
Computational platforms: Iridis
Transdisciplinary tags: Complex Systems, Digital Humanities, HPC, Scientific Computing, Software Engineering